

Bring Your Projects to Life with Hackerbot
Join the open-source community bringing robots into the real world.
A message from the founder
I'm obsessed with a future where robots transform our daily lives. Hackerbot wasn't born in a corporate lab — it emerged from countless late nights, failed prototypes, and an unwavering belief that robotics should be accessible to everyone.
We're a small team fueled by passion, not venture capital, and we've created the platform I desperately wished existed: powerful enough for serious developers but accessible enough for enthusiasts. Every design choice reflects our commitment to you — the creators and dreamers.
I can't wait to see what we'll build together as we bring robots into our homes to handle chores, important tasks, and just plain silly entertainment. This isn't just about technology — it's about reclaiming our time for what truly matters in life.
Join our revolution!
— Ian Bernstein (Founder of Hackerbot, Misty Robotics, & Co-Founder of Sphero)




Our Approach
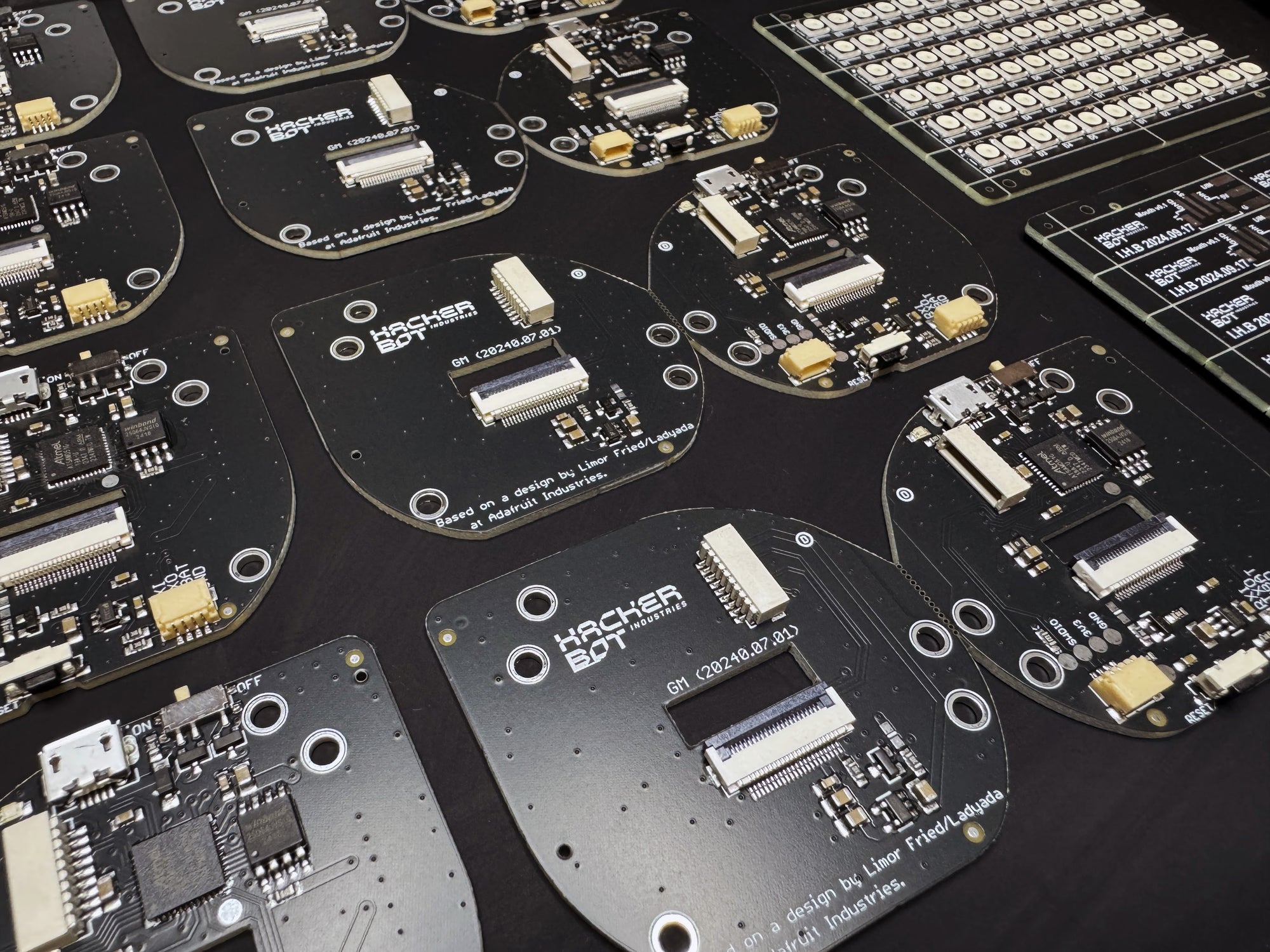
Our abstraction layers manage the complex aspects of robotics, such as sensor fusion, motor control, power management, and board-to-board communication. This allows you to focus solely on writing elegant code for your robot's behavior. For hardware enthusiasts, we provide well-documented circuit boards and comprehensive CAD files, giving you the freedom to customize the physical platform as deeply as you desire.
Hackerbot is comprised of three modular components: the mobile SLAM base for mapping and navigation, an interactive head for human-robot interaction, and a six degree-of-freedom arm with gripper for manipulation. But it doesn't stop there - the hardware and software architecture of Hackerbot is designed to be modular from the ground up, making it infinitely expandable and adaptable to any project's requirements.
The active Hackerbot community has been essential since the very beginning, helping to guide the development of our robots. From our vibrant Discord server to bi-weekly customer calls, you can directly influence the direction of not just the robots, but the company as a whole. Join us to experience what genuine community-driven robotics development is all about.
Key Features
The foundation of Hackerbot's mobility, our advanced SLAM (Simultaneous Localization and Mapping) base maps your space with precision and navigates autonomously through complex environments. Equipped with cliff sensors, bump detection, and ToF sensors, it provides a stable platform for your robotics projects while handling all the low-level navigation complexities.
Never worry about battery management again. Hackerbot intelligently keeps itself alive and can automatically return to its charging dock when needed. This self-sufficiency ensures your robot remains operational without manual intervention, ready for your next interaction whenever you need it.
Bring your robot to life with our expressive 2-DOF head featuring LCD eyes and an audio-responsive LED mouth. Equipped with a global shutter camera, microphone, and quality speaker, it enables natural human-robot interaction through sight, sound, and movement while providing the sensory inputs needed for advanced AI applications.
Transform your robot from interactive to truly useful with our precision 6-degree-of-freedom arm and gripper. Capable of manipulating objects with accuracy, this module comes with its own global shutter camera for enhanced visual guidance, enabling everything from grabbing drinks to organizing your space.

Hackerbot Models
















































| Hackerbot Lite | Hackerbot AI | Hackerbot AI Elite Edition | Hackerbot AI Pro | |
|---|---|---|---|---|
| Base Platform | SLAM Nav, Auto Charge | SLAM Nav, Auto Charge | SLAM Nav, Auto Charge | SLAM Nav, Auto Charge |
| Compute | Arduino | Raspberry Pi 5 8GB | Raspberry Pi 5 8GB | Raspberry Pi 5 8GB |
| AI HAT (Add-On) | - | 13/26 TOPS | 13/26 TOPS | 13/26 TOPS |
| Mounting Platform | Acrylic | Acrylic | Aluminum | Acrylic |
| Primary Camera | No | Global Shutter | Global Shutter | Global Shutter |
| Nav Sensors | LiDAR, Cliff, Bump | LiDAR, Cliff, Bump, ToF | LiDAR, Cliff, Bump, ToF | LiDAR, Cliff, Bump, ToF |
| Audio | No | Mic, Speaker | Mic, Hi-Fi Speaker | Mic, Hi-Fi Speaker |
| Head (2-DOF) | No | No | Yes | Yes |
| LCD Eyes / LED Mouth | No | No | Yes | Yes |
| Arm (6-DOF) | No | No | Yes | No |
| Gripper | No | No | Yes | No |
| Arm Camera | No | No | Yes (Global Shutter) | No |
Autonomous Navigation
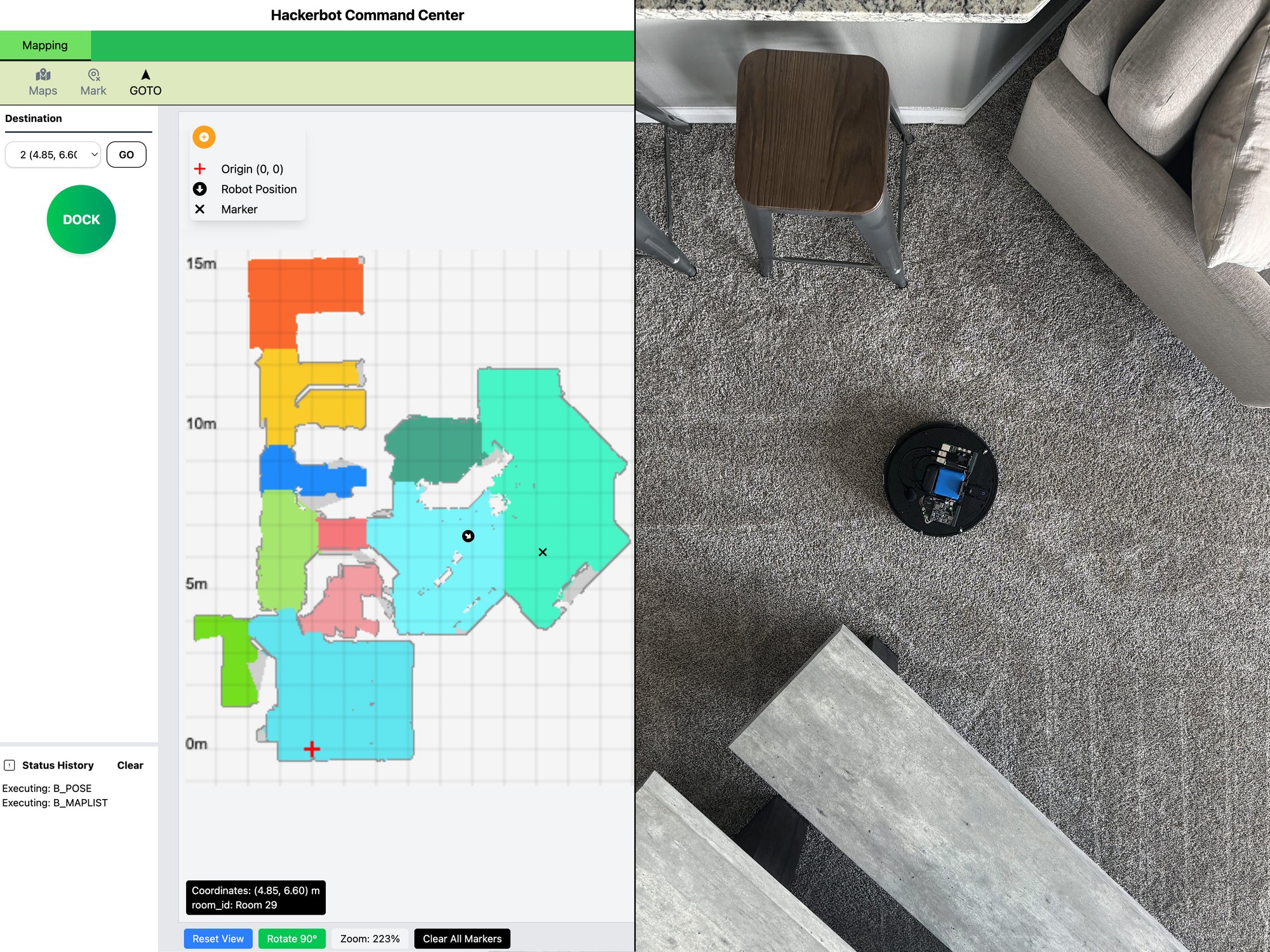
The heart of Hackerbot's mobility is our sophisticated LiDAR-based SLAM navigation system. However, unlike many robots that rely on complex ROS implementations, we've developed a modular solution that handles mapping, localization, and path planning with remarkable efficiency. Our robots create detailed maps of your space, identify obstacles in real-time, and navigate smoothly to destinations with centimeter-level precision. The simplicity of our API means you can command complex navigation tasks with just a few lines of code.
-----
from hackerbot import Hackerbot
bot = Hackerbot()
# Go to an x, y posion of 4.85, 6.6 meters in the map, rotated at 45 degrees, and move at a speed of 0.2m/s
bot.base.maps.goto(4.85, 6.6, 45, 0.2)
Computer Vision & AI
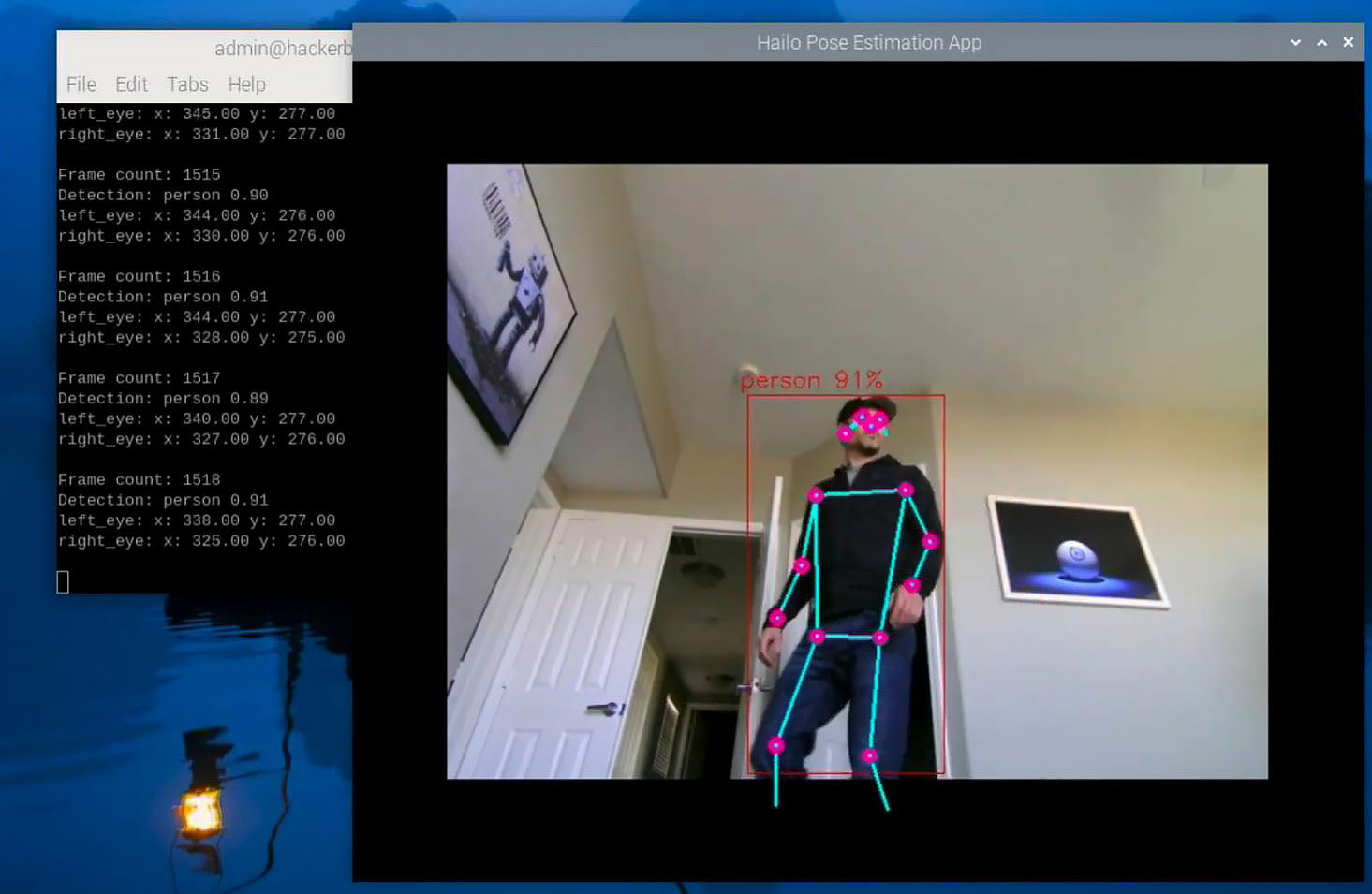
Hackerbot's visual intelligence leverages a global shutter camera that eliminates motion blur, making it ideal for real-time applications. The Raspberry Pi 5 provides ample processing power, with options to add up to 26 TOPS of dedicated AI compute. Set up open-source libraries using our tutorials to do object detection, facial recognition, and spatial awareness in just a few minutes, while remaining expandable for custom models. This integration with popular Python libraries makes implementing advanced vision capabilities surprisingly straightforward.

Manipulation & Interaction
The 6-DOF arm transforms Hackerbot from an observer to an active participant in your world. With precision kinematics and a dedicated vision system, the arm can manipulate objects weighing up to 500g with millimeter accuracy. Our inverse kinematics engine handles the complex math, letting you focus on the high-level task. Whether it's picking up toys, fetching drinks, or gesturing, the arm's approachable API flattens the learning curve of robotics manipulation.
-----
from hackerbot import Hackerbot
bot = Hackerbot()
# Move joint 1 to 20 degrees and joint 4 to 45 degrees at 10 speed
bot.arm.move_joints(20, 0, 0, 45, 0, 0, 10)
# Open the gripper
bot.arm.gripper.open()
Developer Experience
We've designed Hackerbot with one core philosophy: eliminate the friction between idea and implementation. Our Python SDK abstracts away the complexity of robotics while maintaining powerful capabilities. The entire platform is built for extensibility, from the modular hardware components to the library-based software architecture. With comprehensive documentation, active Discord community support, and bi-weekly customer + developer calls, you're never alone in your robotics journey. Best of all, there are no subscriptions or cloud dependencies - your robot works offline and remains entirely under your control.

Use Case Examples

Transform Hackerbot into your personalized AI companion by integrating with existing smart home platforms or create your own custom agent. Have your robot greet you with the latest news, weather, and calendar events while you prepare for work, or command it through voice to control connected devices throughout your home.

Deploy Hackerbot as a mobile security sentinel that patrols your home or small business after hours, leveraging its navigation capabilities and computer vision to detect unusual activity. The robot can alert you to unexpected motion, check if doors are closed, or investigate unusual sounds, providing peace of mind when you're away.

Alleviate your pet's separation anxiety with Hackerbot's interactive capabilities. Program routines to play fetch by picking up and tossing balls, dispense treats at scheduled times, or simply provide moving companionship through pre-programmed interactions that keep your pets engaged and mentally stimulated throughout the day.

Utilize Hackerbot as an affordable yet capable platform for human-robot interaction (HRI) studies, allowing researchers to test social robotics hypotheses without the large budgets typically required. The modular design supports customization for specific research protocols, while the straightforward programming interface enables rapid iteration of experimental scenarios.

End the daily battle of scattered toys with a Hackerbot programmed to identify, grasp, and return toys to their proper storage locations. With object recognition capabilities and the precision 6-DOF arm, your robot can learn to recognize specific toys and organize them according to your preferences while you focus on more meaningful family time.

Support aging-in-place by programming Hackerbot to provide medication reminders, check for fall risks, facilitate video calls with family members, or fetch lightweight items. The robot's consistent presence can reduce isolation while its mobility enables remote caregivers to virtually "check in" on loved ones through the robot's camera and communication systems.

Introduce students to robotics concepts at any skill level, from basic programming and navigation to advanced AI applications and computer vision. Hackerbot's accessible Python API makes it ideal for classrooms and coding clubs, while its practical capabilities demonstrate real-world applications of STEM concepts in an engaging, tangible format.

Automate small item transport around your home or business with Hackerbot's navigation and manipulation capabilities. Program the robot to deliver flowers to a special family member, bring drinks from the kitchen, distribute mail to home office spaces, or transport light inventory items in small retail or workshop environments.




Developer Resources Preview
Our open-source repositories provide complete access to Hackerbot's software and hardware design files. Developers can fork, modify, and contribute back to these repositories, ensuring the platform evolves with community needs and innovations.
Comprehensive and practical documentation covers everything from initial setup to advanced applications, with code examples for common tasks and detailed API references. Our step-by-step tutorials guide you through progressively complex projects, ensuring a smooth learning curve regardless of your robotics experience level.
Our expanding suite of development tools inside the Hackerbot Command Center includes a map visualization utility that enables you to quickly find coordinates or send Hackerbot to a specific location. These tools significantly reduce development time and lower the barrier to entry for robotics innovation.
Our active Discord community connects you directly with the Hackerbot team and fellow developers sharing projects, solving challenges, and collaborating on new applications. Here you will find inspiration and support throughout your robotics journey.
Community Member Testimonials

I was an early backer of the Hackerbot and have not been disappointed. It's like a Turtlebot, but with the character and personality of BB8 or B2EMO. It's what I would expect a hackable mobile base that the brains behind Sphero and Misty would come up with.
- Steve (Hackerbot Lite)

Hackerbot is the perfect balance for me between existing functionality and ease of expansion. The included hardware options are nicely integrated, yet completely open and adaptable to fit many project ideas and runtimes.
-Randy (Hackerbot AI Elite Edition & Hackerbot Head)

Hackerbot is a great platform to quickly learn and try out new technologies and ideas with very little friction.
-Scott (Hackerbot AI Elite Edition)
Getting Started

Select the configuration that matches your project needs. Not sure? Start with the AI Elite Edition - it's our most popular and offers the best value of capabilities and cost.

Typical setup takes under 20 minutes. Just power on, connect to Wi-Fi, and you're ready to start creating. Minimal to no assembly required.

Our starter examples get you controlling your robot in minutes. Copy, paste, and watch your Hackerbot come to life.

Share your projects, learn from others, and help shape the future of Hackerbot through feature requests and contributions.


Frequently Asked Questions
Yes, actually! You also have control over the settings like brush speed and suction level. Turn them off completely, keep your floors clean, or try creative projects like vacuuming emoji patterns into your carpet.
It depends on what you are doing, of course, but anywhere from 2 to 10 hours. We typically see somewhere in the middle range of that.
Absolutely! We have included extra QWIIC/STEMMA connectors so it's very easy to add additional sensors from SparkFun and Adafruit. The CAD files are also available on Github so you can make your own customizations that way as well. We can't wait to see what you add or mod to customize or improve your Hackerbot!
Most applications for Hackerbot run on-device in Python using the Hackerbot Python Library (installed with pip install hackerbot). That said, you can also run the Hackerbot Flask server which gives you a RESTful API. Using that, you can program Hackerbot either on device or from another device on the network in whatever language you prefer.
Not at all! A core premise for Hackerbot is to bring robots to everyone. We abstract out a lot of the hard concepts of robotics so you don't need any knowledge in things like SLAM mapping or ROS. For example, using a mobile app and a single tap of the "Quick Map" button will have the robot drive around to create a floor plan of your house. Then, in only a few lines of Python code you can command your Hackerbot to go to an x, y coordinate in that map. We want you to be able to focus on exciting applications for robots, not just figuring out how to get the robot to move without getting stuck.
We are a group of passionate people who love to talk about robotics, AI, and technology. Please come hang out in our open Discord Community!
We've made it so you can unbox your robot, connect it to wifi, generate a map of your space, and send commands to Hackerbot in well under an hour. We've made Hackerbot easy to get up and running but powerful enough that it's really limitless how deep you want to go. Explore custom AI personalities, grasping, environment exploration, computer vision, and so much more with Hackerbot.
All Hackerbot's are built to order in Boulder, Colorado and it usually takes our team 1-3 working days to get your robot shipped out. If you have any questions don't hesitate to reach out in Discord.
Yes! All of our design files can be found on our Github Repositories.
THANK YOU
Every Hackerbot purchase directly supports our open-source development roadmap. We're not backed by VCs demanding unrealistic growth - we're engineers building tools for other engineers. Your purchase helps us continue expanding the platform while keeping it accessible to everyone.